機(jī)器視覺系統(tǒng) 計(jì)算機(jī)軟硬件融合的技術(shù)開發(fā)與應(yīng)用
機(jī)器視覺系統(tǒng)作為人工智能和自動(dòng)化領(lǐng)域的核心技術(shù)之一,是指通過計(jì)算機(jī)軟硬件結(jié)合的方式,賦予機(jī)器“看”和“理解”圖像或視頻信息的能力。它模擬人類視覺功能,通過圖像采集、處理、分析和決策,實(shí)現(xiàn)對(duì)目標(biāo)對(duì)象的識(shí)別、測(cè)量、定位和檢測(cè)。隨著工業(yè)4.0、智能制造、自動(dòng)駕駛和智能監(jiān)控等領(lǐng)域的快速發(fā)展,機(jī)器視覺系統(tǒng)的技術(shù)開發(fā)日益成為推動(dòng)現(xiàn)代科技創(chuàng)新的重要引擎。
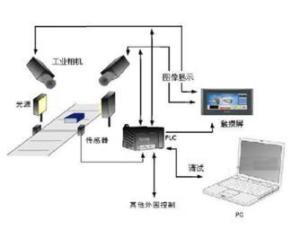
一、機(jī)器視覺系統(tǒng)的核心組成
機(jī)器視覺系統(tǒng)通常由硬件和軟件兩大部分構(gòu)成,二者協(xié)同工作,共同完成視覺任務(wù)。
硬件部分:
1. 圖像采集設(shè)備: 包括工業(yè)相機(jī)、攝像頭、掃描儀等,負(fù)責(zé)捕捉目標(biāo)物體的圖像或視頻數(shù)據(jù)。關(guān)鍵參數(shù)如分辨率、幀率、傳感器類型(如CMOS或CCD)直接影響圖像質(zhì)量。
2. 照明系統(tǒng): 為圖像采集提供穩(wěn)定、均勻的光源,減少環(huán)境光干擾,突出目標(biāo)特征。常見方式有背光、前光、環(huán)形光等。
3. 光學(xué)鏡頭: 負(fù)責(zé)聚焦光線,影響圖像的清晰度、視野和景深。根據(jù)應(yīng)用需求選擇不同焦距、光圈和畸變控制的鏡頭。
4. 圖像處理單元: 通常是高性能計(jì)算機(jī)或嵌入式系統(tǒng)(如工控機(jī)、GPU服務(wù)器),負(fù)責(zé)運(yùn)行視覺算法,進(jìn)行實(shí)時(shí)數(shù)據(jù)處理。
5. 輔助設(shè)備: 如傳感器、機(jī)械臂、傳送帶等,用于與視覺系統(tǒng)聯(lián)動(dòng),實(shí)現(xiàn)自動(dòng)化操作。
軟件部分:
1. 圖像處理算法: 包括圖像預(yù)處理(如濾波、增強(qiáng))、特征提取(如邊緣檢測(cè)、紋理分析)、模式識(shí)別(如模板匹配、深度學(xué)習(xí)分類)等。基于卷積神經(jīng)網(wǎng)絡(luò)(CNN)的深度學(xué)習(xí)技術(shù)大幅提升了識(shí)別的準(zhǔn)確性和適應(yīng)性。
2. 開發(fā)平臺(tái)與工具: 如OpenCV、Halcon、VisionPro等開源或商業(yè)軟件庫,提供豐富的視覺函數(shù)和開發(fā)接口,加速系統(tǒng)構(gòu)建。
3. 控制與集成軟件: 負(fù)責(zé)將視覺結(jié)果轉(zhuǎn)化為控制指令,與PLC、機(jī)器人等設(shè)備通信,實(shí)現(xiàn)閉環(huán)控制。
二、技術(shù)開發(fā)的關(guān)鍵挑戰(zhàn)與發(fā)展趨勢(shì)
在機(jī)器視覺系統(tǒng)的開發(fā)中,技術(shù)團(tuán)隊(duì)需應(yīng)對(duì)多方面的挑戰(zhàn),并緊跟前沿趨勢(shì):
挑戰(zhàn):
- 環(huán)境適應(yīng)性: 復(fù)雜光照、遮擋、目標(biāo)變形等因素可能影響系統(tǒng)穩(wěn)定性,需通過算法優(yōu)化(如自適應(yīng)閾值、多光譜成像)來應(yīng)對(duì)。
- 實(shí)時(shí)性要求: 工業(yè)檢測(cè)或自動(dòng)駕駛等場(chǎng)景需要毫秒級(jí)響應(yīng),這對(duì)硬件算力和軟件效率提出高要求。
- 成本與精度平衡: 高精度系統(tǒng)往往依賴昂貴硬件(如高分辨率相機(jī)、GPU),開發(fā)中需權(quán)衡性能與成本。
- 數(shù)據(jù)與泛化能力: 深度學(xué)習(xí)模型依賴大量標(biāo)注數(shù)據(jù),且在未知場(chǎng)景中可能泛化不足,需通過數(shù)據(jù)增強(qiáng)、遷移學(xué)習(xí)等方法改進(jìn)。
發(fā)展趨勢(shì):
1. 深度學(xué)習(xí)融合: 傳統(tǒng)視覺算法正與深度學(xué)習(xí)深度結(jié)合,實(shí)現(xiàn)更智能的目標(biāo)檢測(cè)(如YOLO、Mask R-CNN)和語義分割。
2. 邊緣計(jì)算與嵌入式視覺: 將處理任務(wù)移至設(shè)備端(如嵌入式GPU、FPGA),減少延遲和帶寬依賴,適用于移動(dòng)機(jī)器人、物聯(lián)網(wǎng)設(shè)備。
3. 3D視覺技術(shù)興起: 通過立體視覺、結(jié)構(gòu)光或ToF(飛行時(shí)間)相機(jī)獲取深度信息,提升對(duì)物體形狀和位置的感知能力,應(yīng)用于精密測(cè)量和AR/VR。
4. 軟硬件協(xié)同優(yōu)化: 定制化硬件(如ASIC芯片)與專用算法結(jié)合,提高能效比,滿足特定場(chǎng)景需求。
5. 云視覺與大數(shù)據(jù)分析: 利用云計(jì)算平臺(tái)處理海量視覺數(shù)據(jù),支持遠(yuǎn)程監(jiān)控和預(yù)測(cè)性維護(hù),推動(dòng)智慧城市和工業(yè)互聯(lián)網(wǎng)發(fā)展。
三、應(yīng)用領(lǐng)域與未來展望
機(jī)器視覺系統(tǒng)已廣泛應(yīng)用于多個(gè)行業(yè):
- 工業(yè)制造: 產(chǎn)品質(zhì)量檢測(cè)(如缺陷識(shí)別、尺寸測(cè)量)、機(jī)器人引導(dǎo)(如裝配、分揀)、生產(chǎn)線監(jiān)控。
- 醫(yī)療健康: 醫(yī)學(xué)影像分析(如CT掃描診斷)、手術(shù)輔助、藥品檢測(cè)。
- 交通與安防: 自動(dòng)駕駛的環(huán)境感知、車牌識(shí)別、人臉識(shí)別門禁系統(tǒng)。
- 農(nóng)業(yè)與物流: 作物生長監(jiān)測(cè)、農(nóng)產(chǎn)品分選、倉儲(chǔ)自動(dòng)化管理。
隨著5G、AI芯片和量子計(jì)算等技術(shù)的突破,機(jī)器視覺系統(tǒng)將朝著更智能、更高效、更普惠的方向發(fā)展。開發(fā)人員需持續(xù)關(guān)注軟硬件技術(shù)創(chuàng)新,跨學(xué)科協(xié)作(如結(jié)合光學(xué)、機(jī)械工程),以構(gòu)建適應(yīng)復(fù)雜場(chǎng)景的魯棒性系統(tǒng),最終推動(dòng)人類社會(huì)向智能化時(shí)代邁進(jìn)。
如若轉(zhuǎn)載,請(qǐng)注明出處:http://www.meishij.com.cn/product/49.html
更新時(shí)間:2026-04-12 06:35:52